Rappresentazione vettoriale delle sinusoidi
- Dettagli
- Categoria: Elettrotecnica
- Pubblicato Giovedì, 15 Maggio 2014 16:39
- Scritto da Super User
- Visite: 7447
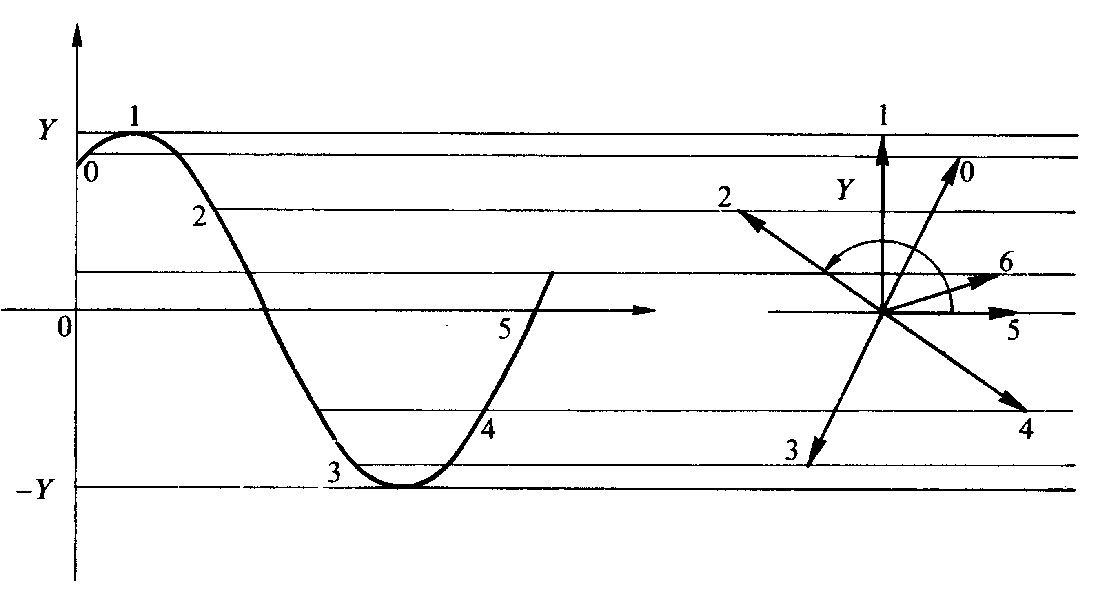
Fig 1.14 - Corrispondenza tra sinusoide e vettore
Le operazioni definite nell'articolo «Operazioni lineari sulle sinusoidi», se eseguite. punto per punto sulle sinusoidi, risultano lunghe, laboriose ed inadatte per calcoli complessi. È tuttavia possibile semplificare notevolmente la procedura di calcolo utilizzando la corrispondenza fra sinusoidi e vettori.
Se si considera un vettore rotante con velocità angolare ω uniforme, e se ne proietta l’estremo sull'asse y come in ffig. 1.14, si osserva che tale proiezione ha andamento sinusoidale nel tempo, con periodo T= 2π/ω e frequenza f = ω/2π.
L’ampiezza della sinusoide è pari al modulo del vettore e la sua fase coincide con l’angolo formato con l’asse di riferimento dal vettore nell'istante zero. La conoscenza del modulo del vettore e della sua posizione angolare nell'istante zero sono sufficienti per identificare completamente la sinusoide corrispondente. Per convenzione, tuttavia, il modulo del vettore viene posto uguale al valore efficace della sinusoide e non al suo valor massimo.
Per quanto detto, ad una sinusoide avente valore efficace Y e fase φ, si può abbinare il vettore corrispondente avente modulo pari ad Y e ruotato dell'angolo φ rispetto all'asse delle ascisse, e viceversa (fig. 1.15). Esso verrà indicato con il simbolo Y In seguito alla convenzione adottata, l’ampiezza della sinusoide viene espressa da:
Osserviamo che il vettore da solo non fornisce alcuna: indicazione sulla frequenza; essa deve essere conosciuta e deve essere la stessa per tutte le sinusoidi considerate nello stesso calcolo. Occorre chiarire subito una cosa importante: mentre tutte le sinusoidi possono essere rappresentate con un vettore, non tutti i vettori rappresentano necessariamente delle sinusoidi.
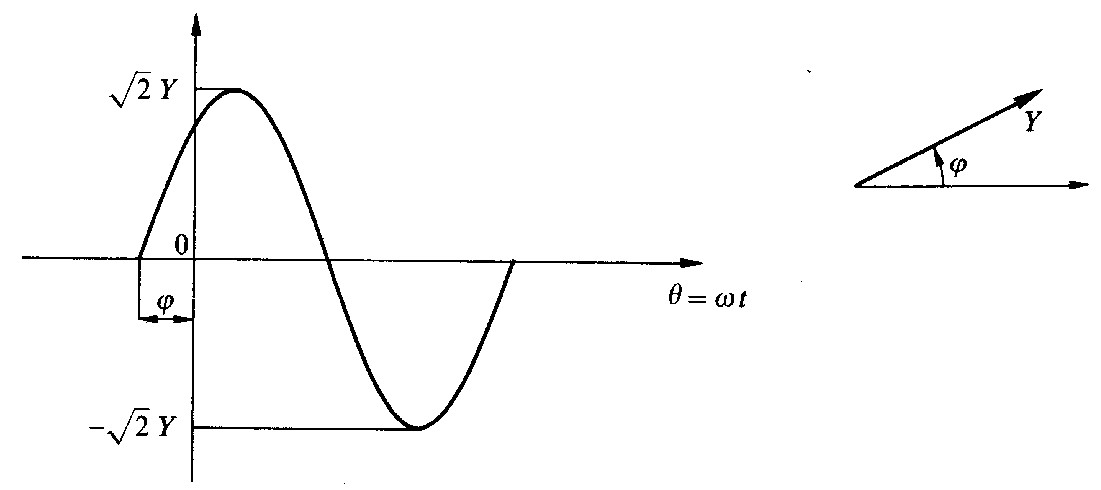
Fig 1.15 - Vettore rappresentativo di una sinusoide
Incontreremo nel seguito l’impedenza e l'ammettenza che, pur essendo indicate per mezzo di vettori, non corrispondono affatto a sinusoidi: esse sono operatori vettoriali.
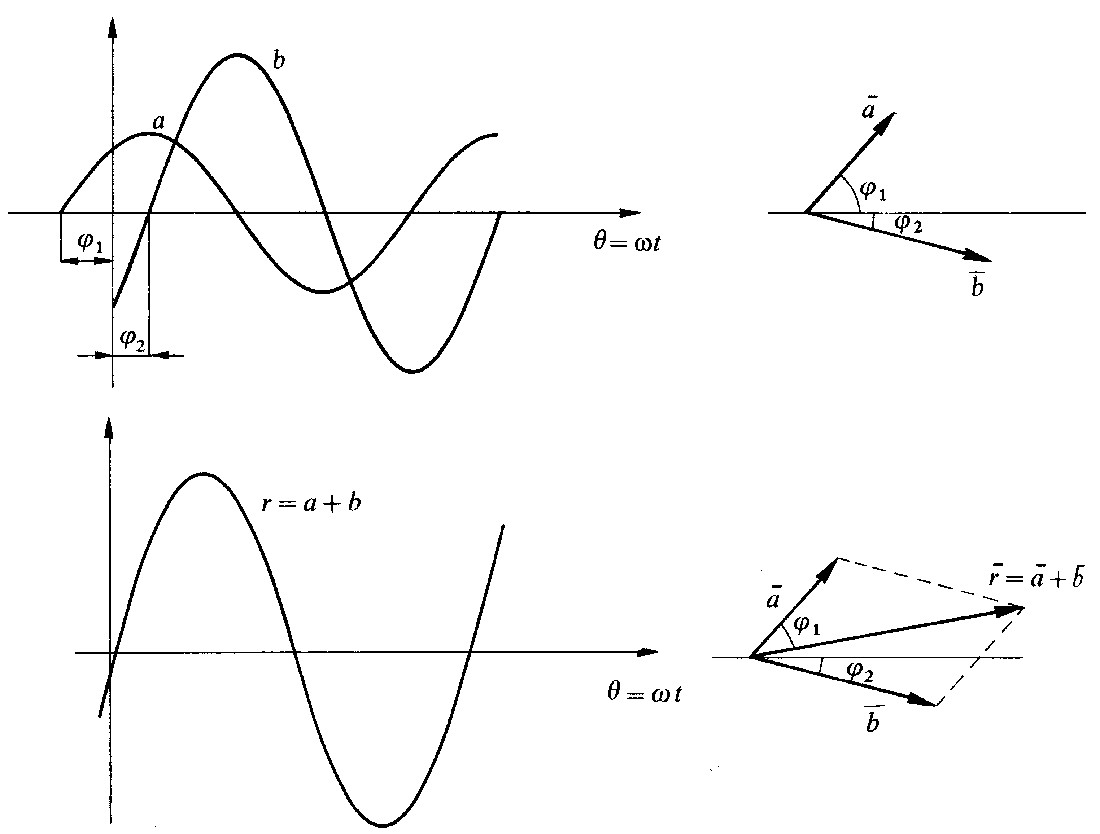
Fig 1.16 - Somma fra sinusoidi eseguita per mezzo dei corrispondenti vettori.
Trasferiamo ora le operazioni lineari fra sinusoidi descritte all'articolo «Operazioni lineari sulle sinusoidi» sui corrispondenti vettori.
Dopo aver trasformato le varie sinusoidi addendi nei corrispondenti vettori si esegue la normale somma vettoriale (fig. 1.16). Il vettore risultante corrisponde alla sinusoide somma.
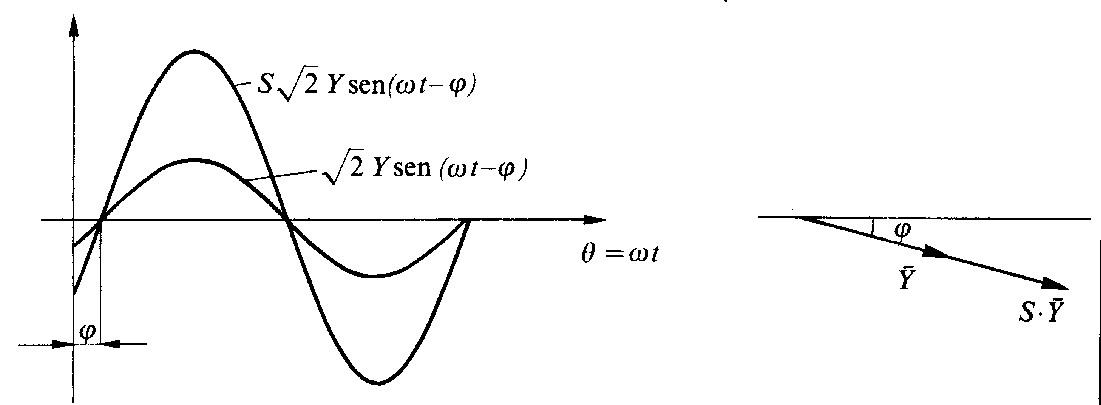
Fig 1.17 - Prodotto di una sinusoide per uno scalare S
Il vettore risultante mantiene la stessa fase, ma il suo modulo viene moltiplicato o diviso per lo stesso scalare S (fig. 1.17).
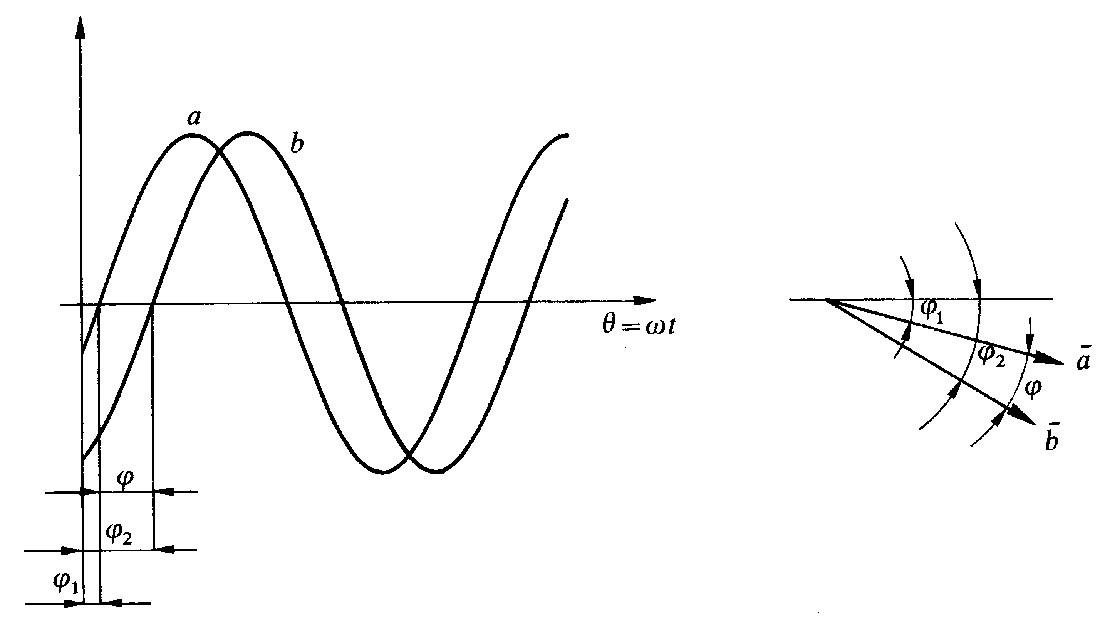
Fig 1.18 - Rotazione di fase
Il vettore mantiene lo stesso modulo, ma viene ruotato dell'angolo φ in senso orario (ritardo) se φ è negativo, oppure in senso antiorario (anticipo) se φ è positivo (fig. 1.18).
Dato un vettore Y che rappresenta una sinusoide, ed un vettore S, che rappresenta un operatore vettoriale, il loro prodotto P ha modulo pari al prodotto dei moduli di Y ed S e fase pari alla somma delle fasi di Y e di S (fig. 1.19)
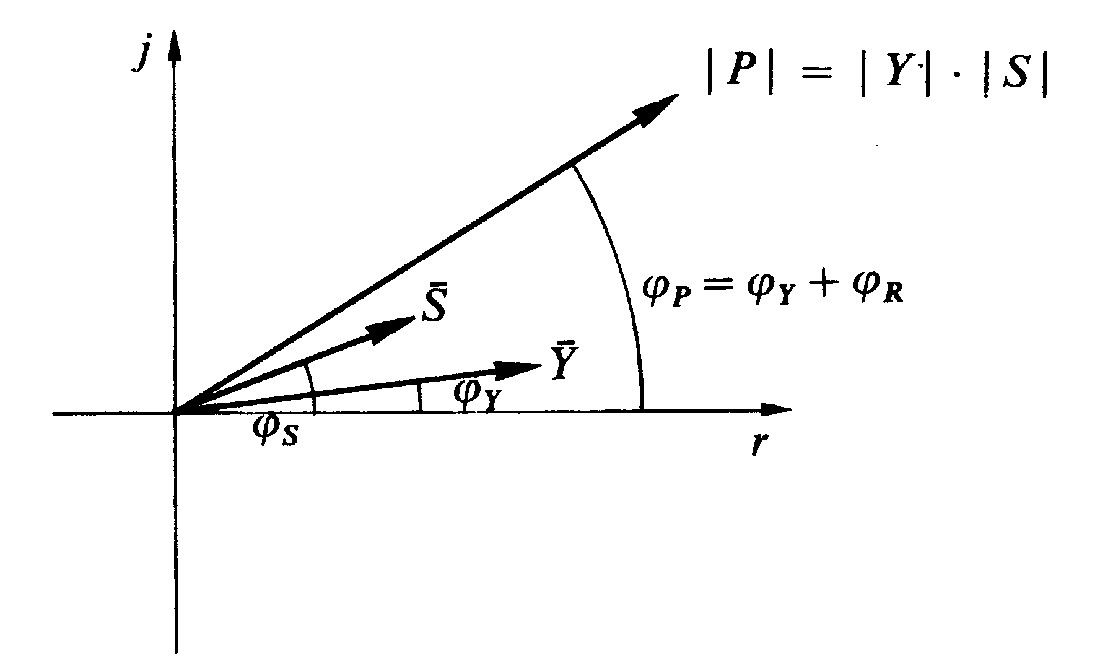
Fig 1.19 -Prodotto tra un vettore ed un operatore vettoriale
Se il vettore Y viene diviso per l’operatore S, il vettore U risultante ha modulo pari ad Y/S e fase pari alla differenza delle fasi di Y e di S (fig. 1.20).
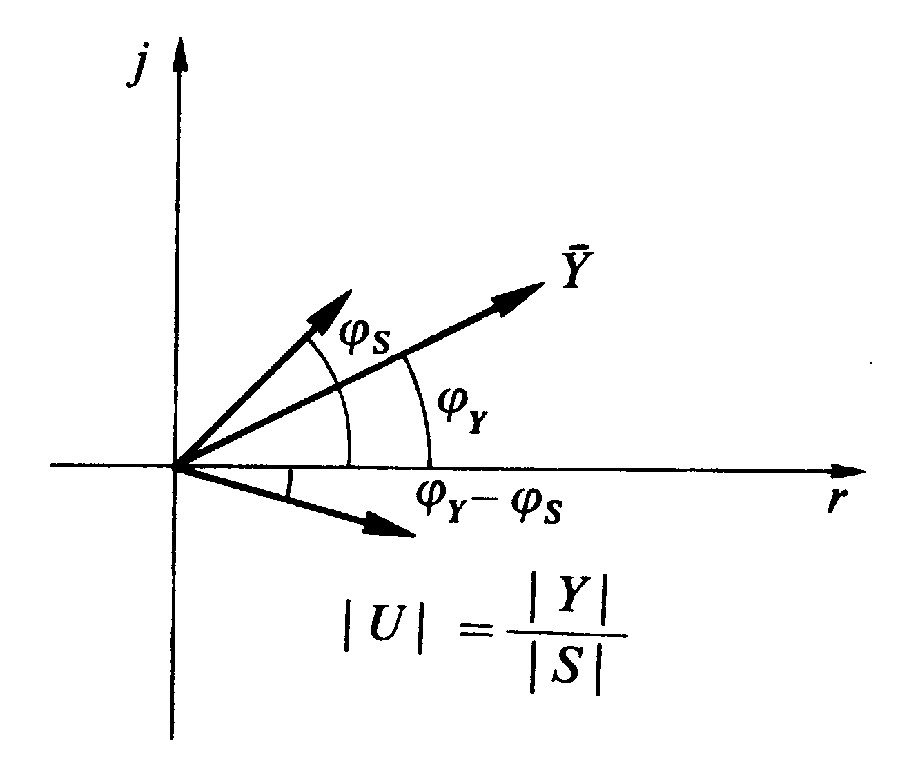
Fig 1.20 - Rapporto tra un vettore ed un operatore vettoriale
Esempio
Effettuare il prodotto del seguente vettore: I= 2A; φI = 30°
per l’operatore vettoriale: Z = 50Ω; φz = 20°
Prodotto
Esempio
Effettuare il rapporto tra i vettori V e I
V=200V ; φV=30°; I=2A ; φI =50°;
Rapporto